DPV-SLAM における AnyLoc 視覚場所認識を用いたループ閉じ込み
Sep 4, 2025·,,,·
0 min read
Wenzheng Zhang
Kazuki Adachi
Yoshitaka Hara
Sousuke Nakamura
 Graphic Abstract
Graphic AbstractAbstract
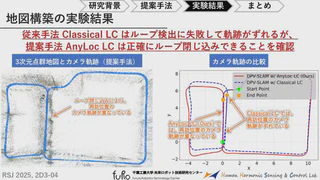
本研究では、単眼 Visual SLAM におけるループ閉じ込み精度の向上を目的として、深層学習に基づく視覚場所認識手法 AnyLoc を DPV-SLAM に統合した。これにより、従来の BoVW ベース手法を置き換え、環境変化に対するロバスト性を向上させた。また、類似度閾値を環境に応じて自動調整する適応機構と幾何検証を組み合わせたループ閉じ込みパイプラインを構築し、実機カメラによる実験で有効性を確認した。
Type
Publication
In 第43回日本ロボット学会学術講演会 (RSJ)