Real-World Evaluation of Monocular Visual SLAM:ORB-SLAM3, DROID-SLAM, DPVO, and DPV-SLAM
Jan 15, 2026·,,,·
0 min read
Kazuki Adachi
Wenzheng Zhang
Yoshitaka Hara
Sousuke Nakamura
 Graphic Abstract
Graphic AbstractAbstract
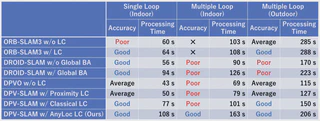
In this paper, we evaluate monocular visual SLAM methods in real-world environments. The methods for eval- uation are ORB-SLAM3, DROID-SLAM, DPVO, and DPV- SLAM. Additionally, we incorporate our proposed method that improves DPV-SLAM using AnyLoc loop closure. ORB-SLAM3 is a classical feature-based visual SLAM method. DROID-SLAM, DPVO, and DPV-SLAM are learning-based methods. DPV-SLAM is the improved method of DPVO, and it has loop closure capa- bility. However, conventional loop closure is not learning-based. Our AnyLoc loop closure utilizes learning-based loop detection, which outperforms classical Bag of Visual Words (BoVW) loop closure. Experimental results demonstrated the properties of each method. Our proposed method achieved high accuracy for SLAM in all environments and reasonable processing time.
Type
Publication
In IEEE International Conference on Industrial Technology (ICIT 2026)