
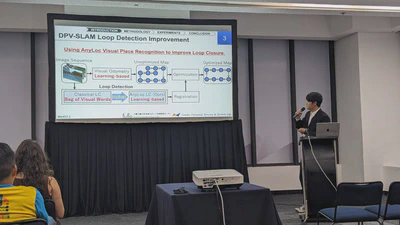
Loop Closure using AnyLoc Visual Place Recognition in DPV-SLAM
Loop Closure; Visual SLAM
Wenzheng Zhang
•
•
1 min readWenzheng Zhang (張 文政) is a PhD student at Hosei University, specializing in autonomous navigation using monocular cameras. His research focuses on topological mapping, visual SLAM, and efficient localization methods for intelligent robotic systems. Building on deep learning–based visual place recognition techniques such as AnyLoc, Zhang’s work improves loop closure detection and mapping accuracy while reducing computational costs. His studies propose lightweight yet robust solutions for visual navigation and mapping in both real-world and simulated environments.
Zhang’s research has contributed to advancements in visual SLAM systems by integrating topological representations with deep feature-based recognition, achieving significant improvements in loop closure accuracy and navigation success rates. His work aims to enhance the scalability, reliability, and adaptability of autonomous systems operating in dynamic and unstructured environments.
Beyond his research, Zhang is passionate about computer vision, robotics, and multimodal AI, and is committed to developing practical and ethical technologies that bridge the gap between human and machine intelligence.
PhD Electrical and Electronic (Robotics Navigation Focus)
Hosei University
MS Electrical and Electronic
Hosei University
BS Geomatics
Shandong University of Science and Technology
My work focuses on topological mapping, visual SLAM, and VLN models for intelligent robotic navigation systems.
Please reach out to collaborate 😃
Loop Closure; Visual SLAM
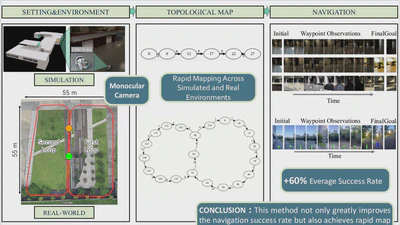
Topological mapping; Visual navigation; Monocular camera

A notable domestic conference held in Hakodate, a peaceful and calm city in Hokkaido, Japan.
A wonderful international conference in Cancun. The food is delicious, and the people are very hospitable. Overall, it’s a very impressive experience.
A wonderful international conference with professor
Selected as a recipient of the Watanuki International Scholarship Foundation scholarship to support doctoral research at Hosei University.

新しい研究論文が「第31回ロボティクスシンポジア」に採択された

New Conference Paper has been accepted for presentation at the 2026 IEEE/SICE International Symposium on System Integration (SII 2026)