Professional Summary
Wenzheng Zhang (張 文政) is a PhD student at Hosei University, specializing in autonomous navigation using monocular cameras. His research focuses on topological mapping, visual SLAM, and efficient localization methods for intelligent robotic systems. Building on deep learning–based visual place recognition techniques such as AnyLoc, Zhang’s work improves loop closure detection and mapping accuracy while reducing computational costs. His studies propose lightweight yet robust solutions for visual navigation and mapping in both real-world and simulated environments.
Zhang’s research has contributed to advancements in visual SLAM systems by integrating topological representations with deep feature-based recognition, achieving significant improvements in loop closure accuracy and navigation success rates. His work aims to enhance the scalability, reliability, and adaptability of autonomous systems operating in dynamic and unstructured environments.
Beyond his research, Zhang is passionate about computer vision, robotics, and multimodal AI, and is committed to developing practical and ethical technologies that bridge the gap between human and machine intelligence.
Education
PhD Electrical and Electronic (Robotics Navigation Focus)
Hosei University
MS Electrical and Electronic
Hosei University
BS Geomatics
Shandong University of Science and Technology
Interests
Visual SLAM
Topological Mapping
Navigation
VLA Models
Robotics
📚 My Research
My work focuses on topological mapping, visual SLAM, and VLA models for intelligent robotic navigation systems.
Please reach out to collaborate 😃
Featured Publications
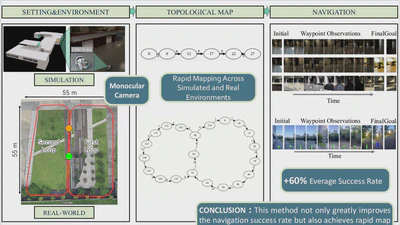
Topological Mapping and Navigation using a Monocular Camera based on AnyLoc
Topological mapping; Visual navigation; Monocular camera
Wenzheng Zhang
•
•
1 min readRecent Publications
(2025).
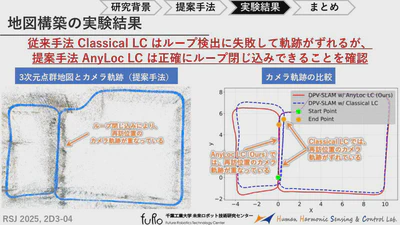
DPV-SLAM における AnyLoc 視覚場所認識を用いたループ閉じ込み.
In RSJ2025.
Recent & Upcoming Talks
CASE 2025 conference
A wonderful international conference with professor
Wenzheng Zhang
•
•
1 min readRecent News

📈 Results effectively with the best data visualizations
Use popular tools such as HuggingFace, Plotly, Mermaid, and data frames.